Come sarà il tempo domani?
L’operazione che effettuiamo per avere la risposta a questa domanda è “semplicemente” cercare le previsioni meteo su Google. Per il resto ci pensano i siti di meteorologia con qualche “magia”.
La predizione dei fenomeni fisici non è cosa affatto semplice e, in molti contesti, non siamo in grado di fornire una risposta esatta. Molto spesso siamo in grado di dare una risposta che si avvicina a quella esatta, ma non lo è. Molti fenomeni sono tuttora così complessi che non si hanno a disposizione modelli matematici in grado di predirne i comportamenti: se così fosse, potremmo predire i futuri terremoti oppure l’esatta traiettoria degli uragani senza alcuna incertezza.
Ovviamente non tutti i fenomeni fisici arrivano ad un tale livello di complessità e possono essere valutati tramite tecniche note, sia analitiche che numeriche. Il problema è che non è sempre possibile procedere per via analitica (ovvero riuscire a risolvere il problema su carta) ma è necessario usare il computer. Ma è fondamentale osservare una cosa: non è il computer che risolve il problema! Siamo noi (umani) che implementiamo modelli matematici di fenomeni fisici mentre il computer si limita a fare i conti!
Nel seguente articolo si discuterà di alcuni metodi numerici per “prevedere” il futuro, ovvero come è possibile risolvere equazioni differenziali ordinarie (ODEs, Ordinary Differential Equations). In particolare verranno descritti i seguenti metodi (o schemi):
- Metodo di Eulero in Avanti o Metodo di Eulero Esplicito (Forward Euler Method)
- Metodo di Eulero all’Indietro o Metodo di Eulero Implicito (Backward Euler Method)
- Metodo dei Trapezi o Metodo di Crank-Nicolson
Introduzione al problema
Le equazioni differenziali si presentano ogniqualvolta sia neccessario esprimere un cambiamento o variazione. Non sono nella matematica ma in molti altri contesti della scienza, le quantità in studio sono descritte come rateo di variazione di altre quantità (ad esempio lo spostamento che è funzione del tempo).
Assumendo che non sia possibile risolvere una ODE analiticamente, si deve procedere per la via numerica, discretizzando il dominio in maniera opportuna con uno step (intervallo) fisso. Vi sono metodi in cui tale intervallo può non essere costante (metodi multistep) in cui quindi l’intervallo varia durante la risoluzione del metodo; per ora ci si limiterà alla classe più semplice.
L’idea di fondo per la risoluzione numerica delle ODE è la discretizzazione del dominio:
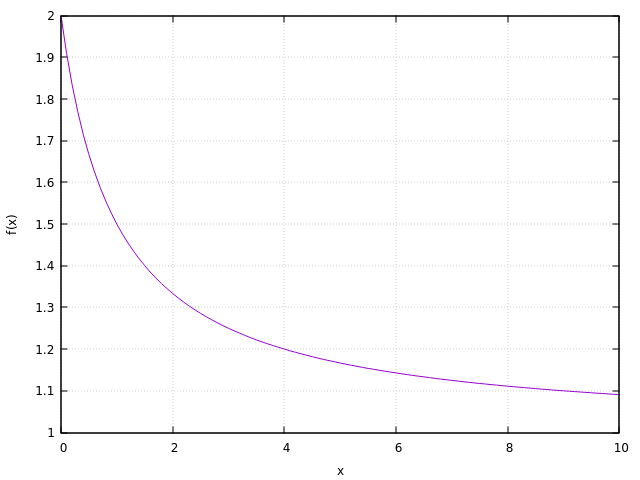
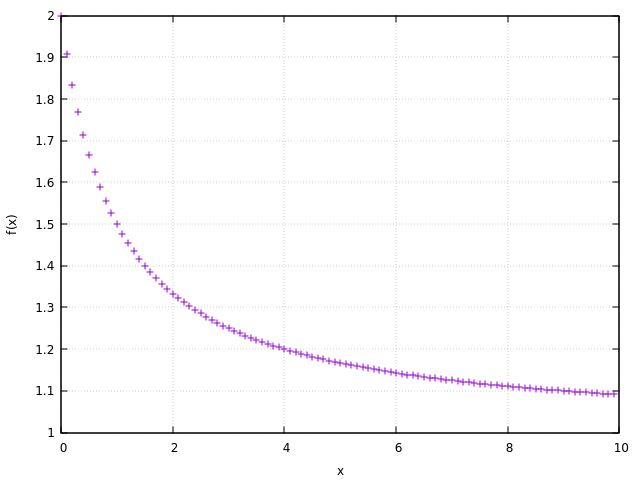
Si immagina di avere una funzione il cui andamento è mostrato nel grafico di sinistra. L’evoluzione della funzione al variare di  è naturalmente continuo, non ci sono “buchi”; contrariamente nella figura a destra notiamo che ci sono dei salti. Tuttavia i due andamenti sono simili, se non coincidenti, ovvero un generico punto sul grafico di destra è contenuto nella curva del grafico di sinistra. Insomma, è come aver preso il grafico a sinistra e lo si è mangiato con un intervallo fisso
è naturalmente continuo, non ci sono “buchi”; contrariamente nella figura a destra notiamo che ci sono dei salti. Tuttavia i due andamenti sono simili, se non coincidenti, ovvero un generico punto sul grafico di destra è contenuto nella curva del grafico di sinistra. Insomma, è come aver preso il grafico a sinistra e lo si è mangiato con un intervallo fisso  .
.
Dal momento che nel seguito ci saranno svariate dimostrazioni e passaggi, si introduce la notazione che è stata adottata.
Definita una funzione  come quella riportata nella figura in alto a sinistra, a seguito della discretizzazione del dominio continuo attraverso un intervallo , si genera un nuovo dominio, formato da valori finiti di , ovvero si ottiene un intervallo finito. Ogni punto di tale intervallo è definito con
come quella riportata nella figura in alto a sinistra, a seguito della discretizzazione del dominio continuo attraverso un intervallo , si genera un nuovo dominio, formato da valori finiti di , ovvero si ottiene un intervallo finito. Ogni punto di tale intervallo è definito con  dove la
dove la  è un indice che va da
è un indice che va da  a
a  , che corrispondono agli estremi dell’intervallo. Nella figura in alto a destra si avrà quindi che
, che corrispondono agli estremi dell’intervallo. Nella figura in alto a destra si avrà quindi che
![\[ x_0 = 0 \qquad x_N = 10 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-61bf64b24474babb2a5c8166d8cd833b_l3.png "Rendered by QuickLaTeX.com")
quindi un generico step potrà essere definito con (ad esempio n=5), mentre il successivo a questo step sarà  , invece il precedente
, invece il precedente  . E’ solo un modo di numerare le posizioni del nuovo dominio, nulla di più.
. E’ solo un modo di numerare le posizioni del nuovo dominio, nulla di più.
Fin qui non si sono introdotti metodi numerici ma si è solo parlato di discretizzazione; facciamo adesso un passo in più.
Immaginiamo quindi di voler risolvere una generica ODE
![\[ \begin{cases} y'(x) = - (y(x)-1)^2 \\ y(0)=2 \end{cases} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-03efff2f73870c525d35e6eaafce0680_l3.png "Rendered by QuickLaTeX.com")
Ci si trova di fronte ad una ODE non lineare (è presente un quadrato) e analiticamente potremmo avere difficoltà nel tentare di risolverla. Immaginiamo però di conoscere la soluzione perché qualcuno ce la fornisce.
![\[ y(x) = \frac{1}{x+1}+1 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-23e181388b3a1f2171c73dfe12b852af_l3.png "Rendered by QuickLaTeX.com")
il cui andamento è mostrato nella seguente figura in un intervallo ![x \in [0,10]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-37aaeb21c97641758e073b3fd27a24da_l3.png "Rendered by QuickLaTeX.com")
che è proprio la prima figura mostrato in precedenza.
In questo caso siamo stati fortunati perché conosciamo la soluzione. Ma se non sappiamo risolvere il problema analiticamente? Magari perché siamo imbranati in Analisi? Forse la numerica ci viene in aiuto…
Metodo di Eulero Esplicito
Il Metodo di Eulero Esplicito è probabilmente il metodo più semplice per poter risolvere una ODE; fu formulato nel 1768 ed è possibile trovarlo in numerose applicazioni a distanza di secoli. Lo schema esplicito è definito così:
(1) ![\[ y(x_{n+1}) = y(x_n) + f(x_n, y(x_{n})) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-e48a7d947d2da9ba5e9bf8a433f09ba2_l3.png "Rendered by QuickLaTeX.com")
Cerchiamo di comprendere la precedente equazione per quello che dice: si è in un dominio discretizzato e ciò è evidente dalla presenza dei valori puntuali del dominio, e . Sono presenti due funzioni, la  e la
e la  , a loro volta definite in un contesto discreto. L’obiettivo è quello di valutare la in uno step successivo rispetto a quello in esame; per farlo è quindi necessario conoscere tutto ciò che è al secondo membro dell’equazione.
, a loro volta definite in un contesto discreto. L’obiettivo è quello di valutare la in uno step successivo rispetto a quello in esame; per farlo è quindi necessario conoscere tutto ciò che è al secondo membro dell’equazione.
E’ importante notare che la precedente equazione non è casuale, ma proviene da una nota espansione, la Serie di Taylor: definita una generica funzione , è possibile “ricreare” il comportamento di tale funzione, stabilito un intorno  rispetto cui si sviluppa, ovvero:
rispetto cui si sviluppa, ovvero:
![\[ y(x) = y(x_0) + \frac{dy(x)}{dx}|_{x_0} (x - x_0) + \frac{1}{2} \frac{d^2y(x)}{d x^2}|_{x_0} (x-x_0)^2 + ... \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-82310757750fafe872d655ee9dc4ee03_l3.png "Rendered by QuickLaTeX.com")
che in forma compatta è esprimibile come:
![\[ y(x) = \sum_{k=0}^{\infty} \frac{y^{k}(x_0) (x-x_0)^k}{k!} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-e025b7d80ddcb82af9c3600dce1a54ba_l3.png "Rendered by QuickLaTeX.com")
dove la  rappresenta la derivata k-esima (e non la potenza)
rappresenta la derivata k-esima (e non la potenza)
La particolarità della Serie di Taylor è che è valida anche se espressa in un contesto discreto. Del resto si è in grado di definire il comportamento di una funzione ad uno step espandendo in uno intorno  . Matematicamente non si sta effettuando alcuna approssimazione, è semplicemente ciò che si è scritto prima, solo che al posto di e ci sono e :
. Matematicamente non si sta effettuando alcuna approssimazione, è semplicemente ciò che si è scritto prima, solo che al posto di e ci sono e :
(2) ![\[ y(x_{n+1}) = y(x_{n}) + \frac{dy}{dx}|_{x_n} (x_{n+1} - x_{n}) + \frac{1}{2} \frac{d^2y}{d x^2}|_{x_n} (x_{n+1}-x_{n})^2 + ... \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-8ab0fa04239aa444a497a2726885037c_l3.png "Rendered by QuickLaTeX.com")
Fintanto che si considerano infiniti termini della sommatoria, il valore della  è esatto, non è assolutamente approssimato. Altra semplificazione che è possibile fare per non appesantire le equazioni è ricordare che lo step tra un valore generico e è fisso, quindi lo si definisce come:
è esatto, non è assolutamente approssimato. Altra semplificazione che è possibile fare per non appesantire le equazioni è ricordare che lo step tra un valore generico e è fisso, quindi lo si definisce come:
![\[ \Delta x = x_{n+1}- x_{n} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-40f5bed2edfa8cbda0c89202519ba795_l3.png "Rendered by QuickLaTeX.com")
ciò permette di riscrivere l’equazione (2) in maniera più semplice
![\[ y(x_{n+1}) = y(x_{n}) + \frac{dy}{dx}|_{x_n} \Delta x+ \frac{1}{2} \frac{d^2y}{d x^2}|_{x_n} \Delta x^2 + ... \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-d0a915fa44375047c7ba1b525454f523_l3.png "Rendered by QuickLaTeX.com")
Il passo aggiuntivo che si fa è approssimare: si decide di troncare al 1° ordine l’espansione in Serie di Taylor, dal momento che vogliamo un’equazione lineare (ciò non toglie che potremmo troncare ad ordini superiori, ma non si giungerebbe allo Schema di Eulero Esplicito):
![\[ y(x_{n+1}) = y(x_{n}) + \frac{dy}{dx}|_{x_n} \Delta x \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-cc314d8d22d0accbf83a8f2ae2ea46b5_l3.png "Rendered by QuickLaTeX.com")
Si nota già una forte somiglianza con la (1) equazione. Infatti, ricordando che la ODE generica che si vuole studiare ha la seguente forma:
![\[ \frac{dy(x)}{dx} = f(x,y(x)) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-d2de3370dd8f8ec6252f4e8232519c04_l3.png "Rendered by QuickLaTeX.com")
allora basta sostituire alla derivata proprio la , ottenendo:
![\[ y(x_{n+1}) = y(x_{n}) + f(x_n, y(x_{n})) \Delta x \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-c70e34315be519d43c90ae47324bcc8b_l3.png "Rendered by QuickLaTeX.com")
Si è tornati alla definizione di Schema (o Metodo) di Eulero Esplicito (1).
Vediamo di applicarlo al problema differenziale di partenza:
![\[ \frac{dy(x)}{dx}= - (y(x)-1)^2 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-f19eb88c5d5d886ab99a27d1b807413e_l3.png "Rendered by QuickLaTeX.com")
Si procede con la discretizzazione dell’equazione, come già fatto in precedenza, ricordando che la derivata è approssimabile con un rapporto finito:
![\[ \frac{y(x_{n+1}) - y(x_{n})}{\Delta x}= - (y(x_n)-1)^2 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-d8993cd8f6a4722ad14dd5c6d1d74ea8_l3.png "Rendered by QuickLaTeX.com")
La si riscrive in modo tale da far apparire lo Schema di Eulero Esplicito.
![\[ y(x_{n+1}) = y(x_n) - (y(x_n)-1)^2 \Delta x \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-9be6281308c03eff819bf47dcb8f6f46_l3.png "Rendered by QuickLaTeX.com")
Si sarebbe potuto giungere allo stesso risultato andando a sostituire la derivata nello Schema di Eulero Esplicito al posto della , come fatto nella dimostrazione precedente. Entrambi gli approcci vanno bene. Di seguito si riporta un codice Fortran 95 e Matlab per l’implementazione dello schema: al posto della variabile indipedente è stata usata la  , ma l’idea rimane la stessa (sono sempre lettere, le si possono chiamare come ci pare). I grafici presenti nell’articolo sono tutti relativi al codice Fortran 95.
, ma l’idea rimane la stessa (sono sempre lettere, le si possono chiamare come ci pare). I grafici presenti nell’articolo sono tutti relativi al codice Fortran 95.
program expliciteuler
implicit none
integer :: i, N
real :: y, dt , tf
real,external :: f
open (unit =1, file =" data .txt ",status ="new")
! Needed step to evaluate the solution . It must to be lesser than 1
! for convergernce analysis
dt = 0.1
! Final time
tf = 10
! Counter
N = tf/dt
! Initial Condition y(0)=2
y = 2
! Writing the first condition in a data file
write (1 ,*) 0.0 , 2.0
do i=1,N
y = y + dt * f(y, (i - 1) * dt)
write (1 ,*)i *dt , y
end do
end program
! The function to be solved , in this case the t is not explicit
real function f(y, t)
implicit none
real , intent (in) :: y, t
f = -y*y + 2*y -1
end function
function [t,y] = explicit_euler(t0,y0,t_end,h,fcn) n = fix((t_end-t0)/h)+1; t = linspace(t0,t0+(n-1)*h,n)'; y = zeros(n,1); y(1) = y0; for i = 2:n y(i) = y(i-1) + h*feval(fcn,t(i-1),y(i-1)); end
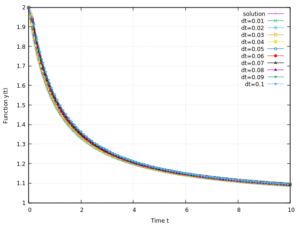
Andiamo a graficare ciò che il codice ci fornisce; in particolare lo si grafica andando a scegliere uno step  (nel codice Fortran 95 è il dt). Plottando si ottiene la seguente figura:
(nel codice Fortran 95 è il dt). Plottando si ottiene la seguente figura:
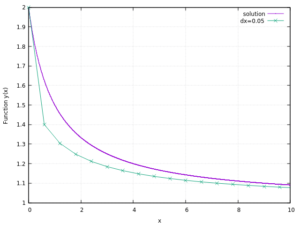 Come primo tentativo non è male: in fin dei conti abbiamo ottenuto una nuova curva che assomiglia a quella esatta, con una piccola differenza di valore iniziale della
Come primo tentativo non è male: in fin dei conti abbiamo ottenuto una nuova curva che assomiglia a quella esatta, con una piccola differenza di valore iniziale della  . Dal momento che possiamo modificare il passo di quanto vogliamo (apparentemente), grafichiamo un insieme di curve con differenti, ottenendo così la seguente figura:
. Dal momento che possiamo modificare il passo di quanto vogliamo (apparentemente), grafichiamo un insieme di curve con differenti, ottenendo così la seguente figura:
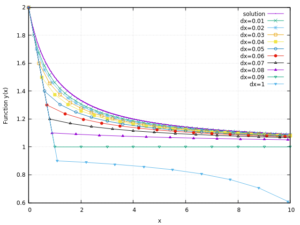
CI si accorge che in fin dei conti non possiamo modificare il di quanto vogliamo, perché raggiunto un certo valore, la soluzione numerica diverge da quella esatta. Cosa significa questo?
La convergenza dello schema è valida fintanto che viene rispettata la seguente equazione:
![\[ |1 + \lambda \Delta x| < 1 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-69d9492e29cd10a345958f8b8cc1d2d0_l3.png "Rendered by QuickLaTeX.com")
dove  , in generale, appartiene a
, in generale, appartiene a  (insieme dei numeri complessi) e il suo valore dipende dal problema in esame.
(insieme dei numeri complessi) e il suo valore dipende dal problema in esame.
Ma come si valuta il ? Bisogna fare uno step in più.
Assoluta Stabilità (A-Stability) per Eulero Esplicito
Ciò che accomuna tutti i metodi numerici è la necessità di rispettare il criterio di convergenza (che cambia da metodo a metodo) e per far ciò è necessario introdurre il concetto di Assoluta Stabilità.
L’Assoluta Stabilità (o A-Stability) definisce il comportamento dello schema nella risoluzione di una generica ODE e permette di stabilire quale sia il limite di che non possiamo superare. Qualora superassimo il limite, la soluzione numerica divergerebbe da quella esatta, quindi avremmo applicato in maniera scorretta uno schema. Per risolvere questo problema, dobbiamo introdurre la linear test equation (equazione test lineare) che permetterà di valutare :
![\[ \begin{cases} y'(x) = \lambda y \\ y(0) = y_0 \end{cases} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-3b318f30588d8a2edb1b71d35af6e8fd_l3.png "Rendered by QuickLaTeX.com")
che è una generica ODE lineare, mentre  è un valore nel punto iniziale. La esatta soluzione, analitica, è:
è un valore nel punto iniziale. La esatta soluzione, analitica, è:
![\[ y(x) = y_0 e^{\lambda x} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-6fbfca2111b45346477b11d25c23db7c_l3.png "Rendered by QuickLaTeX.com")
Se il  , studiando il limite della soluzione:
, studiando il limite della soluzione:
![\[ \lim_{x\rightarrow\infty} y(x) = \lim_{x\rightarrow\infty} y_0 e^{\lambda x} \rightarrow 0 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-df6754f57eba2792285ca6e6e7165717_l3.png "Rendered by QuickLaTeX.com")
Ad esempio, se abbiamo una soluzione del tipo  con
con  avremo questo andamento.
avremo questo andamento.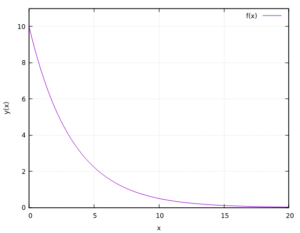
Quindi il limite per  ci sta dicendo di andare a valutare la soluzione per un valore molto grande dell’ascissa. GIà dopo
ci sta dicendo di andare a valutare la soluzione per un valore molto grande dell’ascissa. GIà dopo  la soluzione è praticamente piatta sullo 0, quindi il limite tende a 0.
la soluzione è praticamente piatta sullo 0, quindi il limite tende a 0.
Osservazione: non confondete quest’ultimo grafico con la soluzione esatta o numerica dell’equazione differenziale di partenza. E’ un caso che gli andamenti delle soluzioni sono entrambi decrescenti; se avessimo preso un’altra ODE da studiare, la sua soluzione potrebbe ad esempio essere un esponenziale che cresce fino alla convergenza ad un dato valore.
Ora che abbiamo capito cosa è la linear test equation, si riprende lo Schema di Eulero Esplicito:
![\[ y(x_{n+1}) = y(x_n) + f(x_n, y(x_{n})) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-c6c527416b413f637524fe2174d16812_l3.png "Rendered by QuickLaTeX.com")
Durante la dimostrazione dello schema tramite la Serie di Taylor si era sostituita la funzione  con la con la derivata
con la con la derivata  (perché appunto sono la stessa cosa), quindi si fa questo passaggio utilizzando
(perché appunto sono la stessa cosa), quindi si fa questo passaggio utilizzando  :
:
![\[ y(x_{n+1}) = y(x_n) + \lambda y(x_n) = y(x_n) \, (1+\lambda \Delta x) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-88d1e82b1261634db4006fae886fee2d_l3.png "Rendered by QuickLaTeX.com")
dove nell’ultimo passaggio si sono solo raggruppati i termini.
A questo punto, però, si può notare una cosa: si è scritta la precedente equazione tra lo step  e . Ma se si tornasse indietro fino a che lo step fosse quello iniziale ? Bene, procedendo con questa idea si ottiene questo:
e . Ma se si tornasse indietro fino a che lo step fosse quello iniziale ? Bene, procedendo con questa idea si ottiene questo:
![\[ y(x_{n+1}) = y(x_n) + \lambda y(x_n) = y(x_n) \, (1+\lambda \Delta x) = y(x_{n-2}) \, (1 + \lambda \Delta x)^2 = y(x_{n-3}) \, (1 + \lambda \Delta x)^3 = ... \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-84599465ba314a89ef5887db3617e68f_l3.png "Rendered by QuickLaTeX.com")
![\[ y(x_{n+1}) = y(x_0) (1 + \lambda \Delta x)^n \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-93e1e511e08e4c1d781c2174aa01c093_l3.png "Rendered by QuickLaTeX.com")
Non notate una certa somiglianza con quello che si è scritto prima?
![\[ y(x) = y_0 e^{\lambda x} \qquad \qquad y(x_{n+1}) = y_0 (1 + \lambda \Delta x)^n \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-28b62244198db22a69eafff5f4e84845_l3.png "Rendered by QuickLaTeX.com")
Certo, la prima è una soluzione esatta… ma finchè non consideriamo un dominio discretizzato anche la seconda equazione è esatta ( lo si può considerare come un punto di un dominio continuo). A breve si dimostrerà che affinché la soluzione numerica tenda a quella esatta deve avvenire che
![\[ |1+ \lambda \Delta x| <1 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-ecdd7cdc824e13ac8b09acf48c5f7265_l3.png "Rendered by QuickLaTeX.com")
Siamo giunti alla condizione di Assoluta Stabilità per il Metodo di Eulero Esplicito.
Ma come si traduce questa condizione?
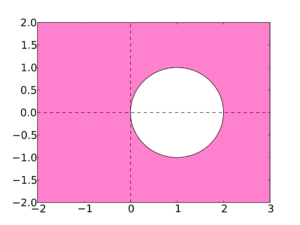
Il è in generale un numero complesso ovvero  ; infatti, la soluzione di una generica ODE potrebbe avere una soluzione armonica, quindi definita da seni/coseni (ovvero da un esponenziale in cui appare un complesso). Pertanto la condizione precedente deve essere intesa in un contesto complesso: ciò significa che la condizione è rispettata solo se il prodotto
; infatti, la soluzione di una generica ODE potrebbe avere una soluzione armonica, quindi definita da seni/coseni (ovvero da un esponenziale in cui appare un complesso). Pertanto la condizione precedente deve essere intesa in un contesto complesso: ciò significa che la condizione è rispettata solo se il prodotto  si trova all’interno del cerchio di centro (-1,0).
si trova all’interno del cerchio di centro (-1,0).
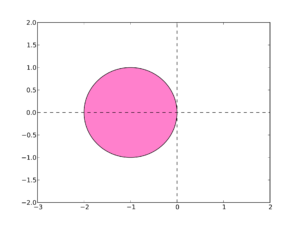
![\[\mathcal{D} = \{ z \in \mathbb{C}: |1 + z| <1 \}\]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-3f85388b0312f5cf432e505980cc860d_l3.png "Rendered by QuickLaTeX.com")
dove appunto 
Ok ma chi ce l’ho dà il ? Anche qui si dimostrerà a breve che la è pari a:
![\[ \lambda = \frac{d f(x_0, y(x_0))}{dy} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-9d9e79cd25c71a27bbb070f5966b902c_l3.png "Rendered by QuickLaTeX.com")
Per dimostrarlo dovremo fare un ultimo passo, che in realtà non aggiunge nulla di nuovo rispetto a ciò che è stato detto finora. SI riparte dalla linear test equation:
e si era già vista la rispettiva soluzione
Si utilizza nuovamente l’espansione in Serie di Taylor attorno al punto generico  :
:
![\[ f(x,y(x)) = f(x_0, y(x_0)) + \frac{d f(x_0,(y(x_0))}{dy} (y(x) - y(x_0)) + ... \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-877fb51d2b0f94854e61fbdcb3aae470_l3.png "Rendered by QuickLaTeX.com")
Troncando la serie al I ordine (quindi si prendono i termini prima dei puntini) e definendo:
![\[ u(x) = y(x) - y(x_0) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-ee7d7cb0580a5d1609b381d3a42aab4d_l3.png "Rendered by QuickLaTeX.com")
![\[ \alpha = \frac{d f(x_0,(y(x_0))}{dy} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-668d9759861fb1ebe6598f70c2bc5259_l3.png "Rendered by QuickLaTeX.com")
![\[ \lambda = \frac{d f(x_0,y(x_0))}{dy} \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-e510c48accdd170955a9c85d2fbc0f9c_l3.png "Rendered by QuickLaTeX.com")
SI giunge all’ODE generalizzata:
![\[ u'(x) = \lambda u(x) + \alpha \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-81336e494b5dfa5696549a0c01f0519d_l3.png "Rendered by QuickLaTeX.com")
dove, dal momento che nello studio della Assoluta Stabilità si considera solo la differenza di soluzioni, si può trascurare l’addendo  , ri-ottenendo la linear test equation se
, ri-ottenendo la linear test equation se  . Insomma, alla fine in questa dimostrazione ci interessa la definizione del ma è stato necessario sviluppare tutti questi passaggi per tornare al punto di partenza.
. Insomma, alla fine in questa dimostrazione ci interessa la definizione del ma è stato necessario sviluppare tutti questi passaggi per tornare al punto di partenza.
A questo punto si hanno tutti gli strumenti necessari per l’applicazione dello Schema di Eulero Esplicito.
Metodo di Eulero Implicito
Dopo aver compreso lo Schema di Eulero Esplicito, si passa ai metodi impliciti che creano sempre problemi agli studenti.
Il Metodo di Eulero Implicito è esprimibile come:
(4) ![\[ y(x_{n+1}) = y(x_n) + f(x_{n+1}, y(x_{n+1})) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-6f26572a0681afa7c74f8e3b7c4fa297_l3.png "Rendered by QuickLaTeX.com")
A questo punto una domanda sorge spontanea: come faccio a trovare il valore della funzione nel passo successivo  se per trovarlo devo conoscere la funzione tramite ? Questo dubbio verrà spiegato in seguito… per ora effettuiamo le stesse considerazioni fatte per lo Schema di Eulero Esplicito.
se per trovarlo devo conoscere la funzione tramite ? Questo dubbio verrà spiegato in seguito… per ora effettuiamo le stesse considerazioni fatte per lo Schema di Eulero Esplicito.
Si dimostra lo Schema di Eulero Implicito: anche qui si riparte dall’espansione in Serie di Taylor: come detto prima, definita una generica funzione , è possibile “ricreare” il comportamento di tale funzione, stabilito un intorno rispetto cui si sviluppa, ovvero:
per cui si è anche detto che l’espansione è valida anche se espressa in un contesto discreto. La differenza rispetto al caso precedente è che, sebbene si vada sempre a troncare al I ordine, il punto scelto in cui si effettua l’espansione non è un punto precedente ma un punto successivo, ovvero:
![\[ y(x_{n}) = y(x_{n+1}) + \frac{dy}{dx}|_{x_{n+1}} (x_{n} - x_{n+1}) + \frac{1}{2} \frac{d^2y}{d x^2}|_{x_{n+1}} (x_{n}-x_{n+1})^2 + ... \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-586b648def17ad593c88c0e9465b8312_l3.png "Rendered by QuickLaTeX.com")
che troncata al I ordine ed imponendo l’uguaglianza (e non l’approssimazione):
![\[ y(x_{n}) = y(x_{n+1}) + \frac{dy}{dx}|_{x_{n+1}} (x_{n} - x_{n+1}) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-0a78dfc7dee50d502521463f47bc73bb_l3.png "Rendered by QuickLaTeX.com")
riscrivibile anche come
![\[ y(x_{n}) = y(x_{n+1}) - \frac{dy}{dx}|_{x_{n+1}} (x_{n+1} - x_{n}) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-08c5c23f59eff9a2c6c865dfabfc28b2_l3.png "Rendered by QuickLaTeX.com")
dove anche qui, ricordando la definizione di , si nota la somiglianza con la (4) equazione. Quindi possiamo dire che
![\[ \frac{dy}{dx}|_{x_{n+1}} = f(x_{n+1}, y(x_{n+1})) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-3b37ee3b81d3b5b7d4b577cdc70f2216_l3.png "Rendered by QuickLaTeX.com")
da cui, spostando il termine con la derivata/funzione al primo membro, si riottiene:
![\[ y(x_{n+1}) = y(x_n) + f(x_{n+1}, y(x_{n+1})) \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-a9f910b2e22064853001df9b1bd289a6_l3.png "Rendered by QuickLaTeX.com")
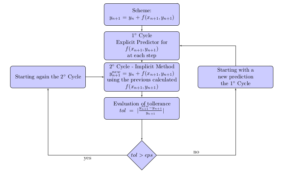
Avendo dimostrato il metodo, l’applicazione alla ODE di partenza segue l’approccio dello Schema di Eulero Esplicito. Ma rimane il problema della funzione al secondo membro: come faccio a calcolare la funzione se è definita dalla stessa incognita che cerco? In realtà il problema non si risolve rimanendo nello Schema di Eulero Implicito, ma si utilizza un predittore esplicito (Explicit Predictor): ogni volta che iteriamo per risolvere lo schema implicito, è necessario prima applicare un metodo esplicito che ci fornisca (ad esempio lo Schema di Eulero Esplicito, ma ce ne sono altri).
Di seguito verranno presentati due script, uno Fortran 95 e l’altro Matlab, che seguono in linea di principio il seguente schema:
program euleroimplicito
implicit none
integer :: i, N, tf
real :: dt, eps, tol, fnew, ynew, del
real, external :: fu
real, allocatable :: f(:), y(:)
open(unit=1,file="data3.txt",status="new")
eps = 0.01
tf = 1
dt = 0.01
N = int(tf/dt)
allocate(f(N))
allocate(y(N))
y(1) = 2.0
write(1,*) 0, 2.0
do i=2,N
f(i) = fu(y(i-1), (i - 1) * dt)
y(i) = y(i-1) + dt * f(i)
write(1,*) i*dt, y(i)
tol = 1.0
do while (tol > eps)
fnew = fu(y(i), i*dt)
ynew = y(i-1) + dt * fnew
tol = abs((ynew-y(i))/y(i))
y(i) = ynew
f(i) = fnew
end do
end do
deallocate(f)
deallocate(y)
end program
! f(y,t): si inserisce la funzione che poi viene richiamata sopra
real function fu(y, t)
implicit none
real, intent(in) :: y, t
fu = -y*y + 2*y -1
end function
function [t,y,flag]=eulero_implicito(t0,y0,t_end,h,fcn,tol)
flag=0;
max_count=100;
n = fix((t_end-t0)/h) + 1;
t = linspace(t0,t0+(n-1)*h,n)';
y = zeros(n,1); y(1) = y0;
for i=2:n
yt1 = y(i-1) + h*feval(fcn,t(i-1),y(i-1));
count = 0; diff = 1;
while diff(end) > tol && count < max_count
yt2 = y(i-1) + h*feval(fcn,t(i),yt1);
diff(count+1) = abs(yt2-yt1);
yt1 = yt2;
count = count +1;
end
if count >= max_count
flag=1;
end
y(i) = yt2;
end
Assoluta Stabilità (A-Stability) per Eulero Implicito
Anche per lo Schema di Eulero Implicito è fondamentale lo studio della convergenza. Prima di effetuarne la dimostrazione, possiamo dire che lo schema risulta assolutamente stabile se è rispettata la seguente disuguaglianza:
![\[ |\frac{1}{1 - \lambda \Delta x}| < 1 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-53cd98e174ec350063e2a6c03723be41_l3.png "Rendered by QuickLaTeX.com")
Notiamo quindi che il criterio di convergenza è un po’ diverso da quello dell’Eulero Esplicito. Anche qui dimostriamo tale disuguaglianza ripartendo dalla linear test equation (i primi passi sono gli stessi del caso Esplicito):
generica ODE lineare, la cui esatta soluzione, analitica, è:
Se il , studiando il limite della soluzione:
A questo punto si riprende lo Schema di Eulero Implicito:
![\[ y_{n+1} = y_n + f(x_{n+1}, y(x_{n+1})) \Delta x \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-932f0f784225b230903a6834202c8629_l3.png "Rendered by QuickLaTeX.com")
Durante la dimostrazione dello schema tramite la Serie di Taylor, si era sostituita la funzione  con la derivata
con la derivata  :
:
![\[ y_{n+1} = y_n + \lambda y(x_{n+1}) \Delta x \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-9df1d6781090f20097adfbd44adf29aa_l3.png "Rendered by QuickLaTeX.com")
dove, raggruppando al primo membro il termine e poi dividendo tutto per  si giunge a:
si giunge a:
![\[ y_{n+1} = \frac{1}{1-\lambda \Delta x} y_n \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-271858ab8f89aa666953d6487a163fb6_l3.png "Rendered by QuickLaTeX.com")
Come fatto in precedenza, anche qui si nota che l’equazione è stata scritta tra uno step e uno step , quindi si torna indietro fino allo step :
![\[y_{n+1} = \frac{1}{1-\lambda \Delta x} y_n = (\frac{1}{1-\lambda \Delta x})^2 y_{n-1} = ... = (\frac{1}{1-\lambda \Delta x})^n y_0 \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-850d0861660ccda2c6ca66fd44d8b9e8_l3.png "Rendered by QuickLaTeX.com")
dove si nota, anche qui, la somiglianza tra i seguenti:
![\[ y(x) = y_0 e^{\lambda x} \qquad \quad y_{n+1} = y_0 (\frac{1}{1-\lambda \Delta x})^n \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-7c220961f4e912237463f6a4744463b5_l3.png "Rendered by QuickLaTeX.com")
Per lo stesso ragionamento fatto nel caso dell’Eulero Esplicito, il è in generale un numero complesso ovvero . Affinché la condizione di convergenza precedente sia rispettate allora il valore del deve essere esterno al cerchio di raggio unitario e di centro (1,0) nel piano complesso.
ovvero si ha il caso (quasi) opposto di Eulero Esplicito; si deve rimanere nel dominio ed esterni al cerchio,
![\[\mathcal{D} = \{ z \in \mathbb{C}: |\frac{1}{1-\lambda \Delta x}| <1 \}\]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-bf8f42870e6a9bc783c62d8ec09dc810_l3.png "Rendered by QuickLaTeX.com")
dove appunto
I ragionamenti per la valutazione di sono gli stessi effettuati per lo Schema di Eulero Esplicito quindi evito di riportare lo stesso procedimento qui di seguito.
Metodo dei Trapezi o Metodo di Crank-Nicolson
Un altro metodo molto utilizzato è quello di Crank-Nicolson; si tratta sempre di uno schema implicito, quindi può essere trattato come l’Eulero all’Indietro. Non si farà alcuna dimostrazione di questo schema per non appesantire l’articolo ma si daranno solo i risultati fondamentali per la sua implementazione. In particolare, è chiamato “metodo dei trapezi” poiché esso è definito nella seguente maniera:
(5) ![\[ y_{n+1} = y_n + \frac{\Delta x}{2} [f(x_n, y_n) + f(x_{n+1},y_{n+1})] \]](https://www.mautonedavide.it/wp-content/ql-cache/quicklatex.com-c8c3cc7885de599ae74e45b22076bd3e_l3.png "Rendered by QuickLaTeX.com")
dove al secondo membro della ODE è presente un’espressione che ricorda, appunto, l’area di un trapezio ( ).
).
Anche in questo caso, trattandosi di uno schema implicito, è necessario utilizzare un Predittore Esplicito che possa fornire ad ogni iterazione un guess sulla quantità cosicché lo schema possa procedere. In generale tale metodo segue i passi riportati nel flow chart:
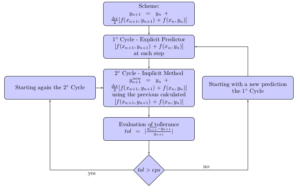
Anche qui si riporta un codice Fortran 95 per l’implementazione in cui il predittore esplicito è sempre quello di Eulero.
program cranknicolson
implicit none
integer :: i, N, tf
real :: dt, eps, tol, fnew, ynew
real, external :: fu
real, allocatable :: f(:), y(:)
open(unit=1,file="data6.txt",status="new")
eps = 0.01
tf = 1
dt = 0.01
N = int(tf/dt)
allocate(f(N))
allocate(y(N))
y(1) = 2.0
write(1,*) 0, 2.0
i=1
y(2) = y(1) + dt * fu(y(1),i*dt)
do i=2,N
f(i) = (fu(y(i-1), (i-1)*dt) + fu(y(i), i*dt))
y(i) = y(i-1) + 0.5*dt*f(i)
write(1,*) i*dt, y(i)
tol = 1.0
do while (tol > eps)
fnew = (fu(y(i-1), (i-1)*dt) + fu(y(i), i*dt))
ynew = y(i-1) + 0.5*dt*fnew
tol = abs((ynew-y(i))/y(i))
y(i) = ynew
f(i) = fnew
end do
end do
deallocate(f)
deallocate(y)
end program
! f(y,t): si inserisce la funzione che poi viene richiamata sopra
real function fu(y, t)
implicit none
real, intent(in) :: y, t
fu = -y*y + 2*y -1
end function
Per ulteriori approfondimento, consiglio il seguente corso del MIT.
Sii il primo a commentare